期刊文章
过刊浏览
- Volumes 84-95 (2024)
-
Volumes 72-83 (2023)
-
Volume 83
Pages 1-258 (December 2023)
-
Volume 82
Pages 1-204 (November 2023)
-
Volume 81
Pages 1-188 (October 2023)
-
Volume 80
Pages 1-202 (September 2023)
-
Volume 79
Pages 1-172 (August 2023)
-
Volume 78
Pages 1-146 (July 2023)
-
Volume 77
Pages 1-152 (June 2023)
-
Volume 76
Pages 1-176 (May 2023)
-
Volume 75
Pages 1-228 (April 2023)
-
Volume 74
Pages 1-200 (March 2023)
-
Volume 73
Pages 1-138 (February 2023)
-
Volume 72
Pages 1-144 (January 2023)
-
Volume 83
-
Volumes 60-71 (2022)
-
Volume 71
Pages 1-108 (December 2022)
-
Volume 70
Pages 1-106 (November 2022)
-
Volume 69
Pages 1-122 (October 2022)
-
Volume 68
Pages 1-124 (September 2022)
-
Volume 67
Pages 1-102 (August 2022)
-
Volume 66
Pages 1-112 (July 2022)
-
Volume 65
Pages 1-138 (June 2022)
-
Volume 64
Pages 1-186 (May 2022)
-
Volume 63
Pages 1-124 (April 2022)
-
Volume 62
Pages 1-104 (March 2022)
-
Volume 61
Pages 1-120 (February 2022)
-
Volume 60
Pages 1-124 (January 2022)
-
Volume 71
- Volumes 54-59 (2021)
- Volumes 48-53 (2020)
- Volumes 42-47 (2019)
- Volumes 36-41 (2018)
- Volumes 30-35 (2017)
- Volumes 24-29 (2016)
- Volumes 18-23 (2015)
- Volumes 12-17 (2014)
- Volume 11 (2013)
- Volume 10 (2012)
- Volume 9 (2011)
- Volume 8 (2010)
- Volume 7 (2009)
- Volume 6 (2008)
- Volume 5 (2007)
- Volume 4 (2006)
- Volume 3 (2005)
- Volume 2 (2004)
- Volume 1 (2003)
Volume 49
Zhou, W., Luo, X., Chen, B., Zhang, Y., & Cai, X. (2020). Estimation of particle depth from two defocused images using the Fourier transform. Particuology, 49, 48-54. https://doi.org/10.1016/j.partic.2019.04.002
Estimation of particle depth from two defocused images using the Fourier transform
Wu Zhou a b *, Xu Luo a b, Benting Chen a b, Yukun Zhang a b, Xiaoshu Cai a b
a School of Energy and Power Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China
b Shanghai Key Laboratory of Multiphase Flow and Heat Transfer in Power Engineering, Shanghai 200093, China
10.1016/j.partic.2019.04.002
Volume 49,
April 2020,
Pages 48-54
Received 27 January 2019, Revised 30 March 2019, Accepted 2 April 2019, Available online 9 July 2019, Version of Record 26 February 2020.
E-mail:
zhouwu@usst.edu.cn
Highlights
• We establish the functional relationship between object depth and standard variation of relative blur kernel.
• We estimate the depth from two defocused images using the Fourier transform.
• Our numerical simulations are consistent with our experimental results.
• Our system and image processing algorithm is robust for different particle types.
Abstract
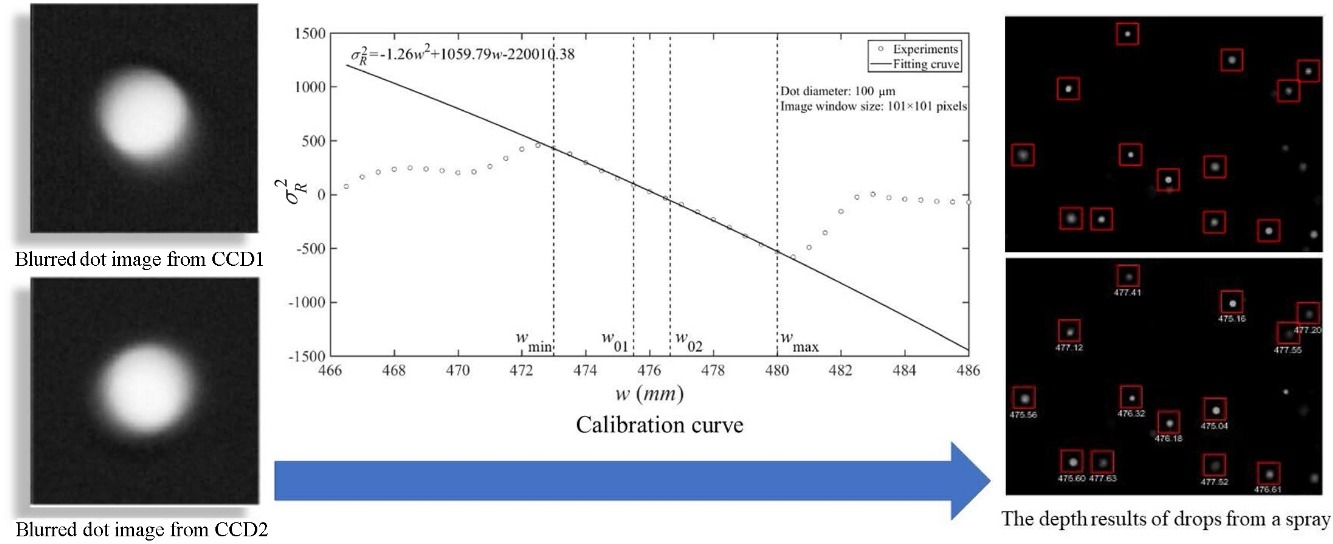
Depth from defocus is one technology for depth estimation. We estimate particle depth information from two defocused images captured simultaneously by two coaxial cameras with different imaging distances. The images are processed with the Fourier transform to obtain the characteristic parameter (i.e., the standard deviation of the relative blur kernel of these two defocused images). First, we theoretically analyze the functional relationship between the object depth and the standard deviation or variation of the relative blur kernel. Then, we verify the relationship experimentally. We analyze the influence of particle size, window size and image noise on the calibration curves using both numerical simulations and experiments. We obtain the depth range and accuracy of this measurement system experimentally. For the verification experiments, we use a sample of glass microbeads and the irregularly-shaped dust particles on a microscope slide. Both of these experiments present a suitable depth measurement result. Finally, we apply the measuring system to the depth estimation of drops from a small anti-fogging spray. The results show that our system and image processing algorithm are robust for different types of particles, facilitating the in-line three-dimensional positioning of particles.
Graphical abstract
Keywords
Depth from two defocused images; Fourier transform; Standard deviation of relative blur kernel; Drops depth measurement; Sensitivity and accuracy analysis
文章导读