期刊文章
过刊浏览
- Volumes 96-107 (2025)
-
Volumes 84-95 (2024)
-
Volume 95
Pages 1-392 (December 2024)
-
Volume 94
Pages 1-400 (November 2024)
-
Volume 93
Pages 1-376 (October 2024)
-
Volume 92
Pages 1-316 (September 2024)
-
Volume 91
Pages 1-378 (August 2024)
-
Volume 90
Pages 1-580 (July 2024)
-
Volume 89
Pages 1-278 (June 2024)
-
Volume 88
Pages 1-350 (May 2024)
-
Volume 87
Pages 1-338 (April 2024)
-
Volume 86
Pages 1-312 (March 2024)
-
Volume 85
Pages 1-334 (February 2024)
-
Volume 84
Pages 1-308 (January 2024)
-
Volume 95
-
Volumes 72-83 (2023)
-
Volume 83
Pages 1-258 (December 2023)
-
Volume 82
Pages 1-204 (November 2023)
-
Volume 81
Pages 1-188 (October 2023)
-
Volume 80
Pages 1-202 (September 2023)
-
Volume 79
Pages 1-172 (August 2023)
-
Volume 78
Pages 1-146 (July 2023)
-
Volume 77
Pages 1-152 (June 2023)
-
Volume 76
Pages 1-176 (May 2023)
-
Volume 75
Pages 1-228 (April 2023)
-
Volume 74
Pages 1-200 (March 2023)
-
Volume 73
Pages 1-138 (February 2023)
-
Volume 72
Pages 1-144 (January 2023)
-
Volume 83
-
Volumes 60-71 (2022)
-
Volume 71
Pages 1-108 (December 2022)
-
Volume 70
Pages 1-106 (November 2022)
-
Volume 69
Pages 1-122 (October 2022)
-
Volume 68
Pages 1-124 (September 2022)
-
Volume 67
Pages 1-102 (August 2022)
-
Volume 66
Pages 1-112 (July 2022)
-
Volume 65
Pages 1-138 (June 2022)
-
Volume 64
Pages 1-186 (May 2022)
-
Volume 63
Pages 1-124 (April 2022)
-
Volume 62
Pages 1-104 (March 2022)
-
Volume 61
Pages 1-120 (February 2022)
-
Volume 60
Pages 1-124 (January 2022)
-
Volume 71
- Volumes 54-59 (2021)
- Volumes 48-53 (2020)
- Volumes 42-47 (2019)
- Volumes 36-41 (2018)
- Volumes 30-35 (2017)
- Volumes 24-29 (2016)
- Volumes 18-23 (2015)
- Volumes 12-17 (2014)
- Volume 11 (2013)
- Volume 10 (2012)
- Volume 9 (2011)
- Volume 8 (2010)
- Volume 7 (2009)
- Volume 6 (2008)
- Volume 5 (2007)
- Volume 4 (2006)
- Volume 3 (2005)
- Volume 2 (2004)
- Volume 1 (2003)
Volume 104
Santarossa, A., D’Angelo, O., Sack, A., & Pöschel, T. (2025). All-terrain granular gripper. Particuology, 104, 283-288. https://doi.org/10.1016/j.partic.2025.07.006
All-terrain granular gripper (Open Access)
Angel Santarossa a, Olfa D’Angelo a b, Achim Sack a, Thorsten Pöschel a *
a Institute for Multiscale Simulations, Friedrich-Alexander-Universität Erlangen-Nürnberg, Cauerstraße 3, Erlangen, D-91058, Bavaria, Germany
b Institut Supérieur de l'Aéronautique et de l'Espace ISAE-SUPAERO, 10 Av. Edouard Belin BP 54032, F-31055 Toulouse, France
10.1016/j.partic.2025.07.006
Volume 104,
September 2025,
Pages 283-288
Received 8 April 2025, Revised 30 May 2025, Accepted 7 July 2025, Available online 22 July 2025, Version of Record 28 July 2025.
E-mail:
thorsten.poeschel@fau.de
Highlights
• Adaptive gripping enabled by the jamming transition in granular materials.
• Enhanced gripping through granulate-suction synergy, by integrating an independent suction cup within the gripper.
• The composition of the granulate affects the holding force, in particular the stiffness of the particles.
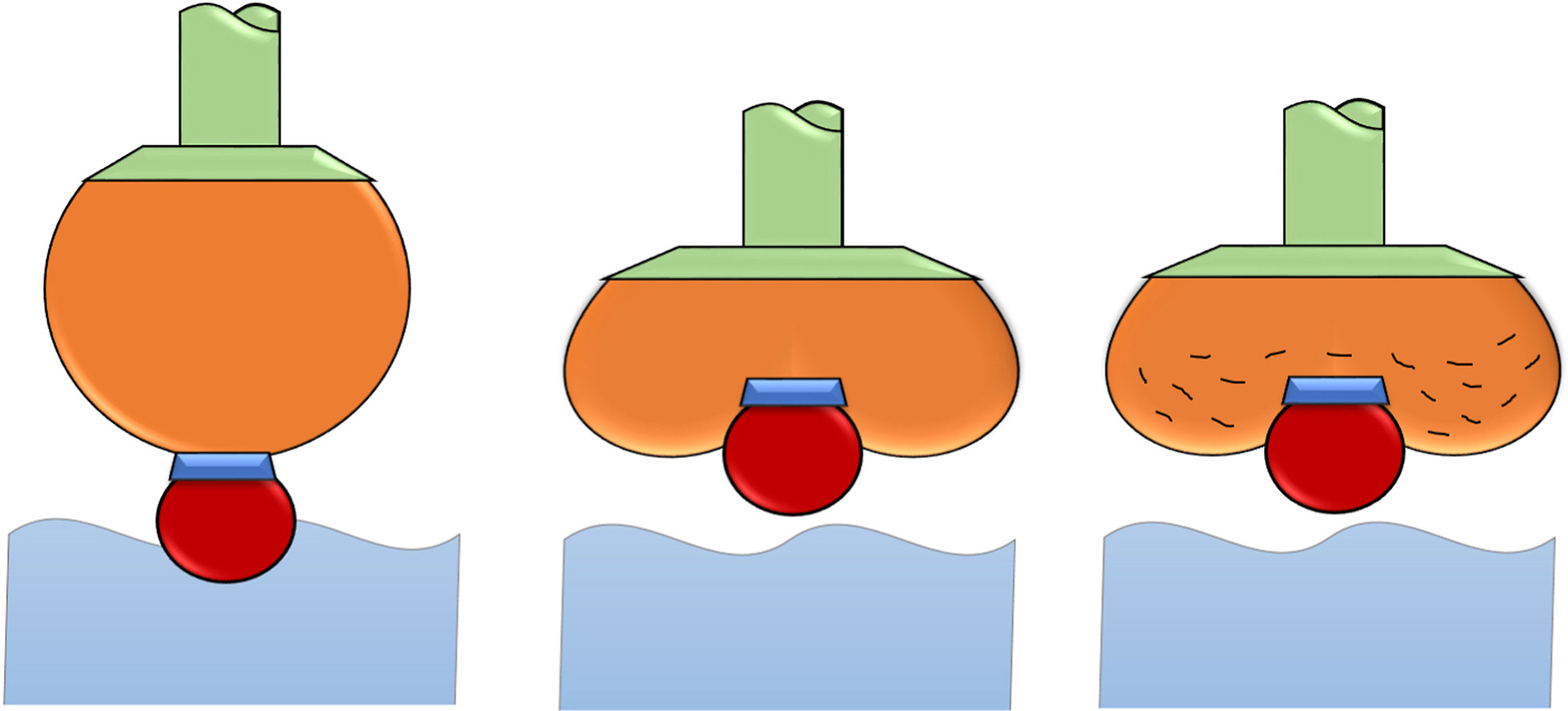
Abstract
Granular grippers can manipulate a wide variety of objects, but need to be pressed against the object to conform to it. If the object is placed on unstable ground, e.g., on sand or water, this step might cause the object to sink or move away from the gripper, hindering proper operation. We introduce a granular gripper with an integrated suction cup, where suction and jamming are controlled independently. We demonstrate the system’s robust and enhanced gripping capabilities by comparing its grasping performance with a typical granular gripper design. We show that the proposed device can grip objects that are challenging for typical granular grippers, including those placed on unstable ground, as the suction cup stabilizes the object, allowing the gripper to conform.
Graphical abstract
Keywords
All-terrain; Granular; Jamming; Suction; Granular gripper; Soft robotics
文章导读