期刊文章
过刊浏览
- Volumes 108-119 (2025)
-
Volumes 96-107 (2025)
-
Volume 107
Pages 1-376 (December 2025)
-
Volume 106
Pages 1-336 (November 2025)
-
Volume 105
Pages 1-356 (October 2025)
-
Volume 104
Pages 1-332 (September 2025)
-
Volume 103
Pages 1-314 (August 2025)
-
Volume 102
Pages 1-276 (July 2025)
-
Volume 101
Pages 1-166 (June 2025)
-
Volume 100
Pages 1-256 (May 2025)
-
Volume 99
Pages 1-242 (April 2025)
-
Volume 98
Pages 1-288 (March 2025)
-
Volume 97
Pages 1-256 (February 2025)
-
Volume 96
Pages 1-340 (January 2025)
-
Volume 107
-
Volumes 84-95 (2024)
-
Volume 95
Pages 1-392 (December 2024)
-
Volume 94
Pages 1-400 (November 2024)
-
Volume 93
Pages 1-376 (October 2024)
-
Volume 92
Pages 1-316 (September 2024)
-
Volume 91
Pages 1-378 (August 2024)
-
Volume 90
Pages 1-580 (July 2024)
-
Volume 89
Pages 1-278 (June 2024)
-
Volume 88
Pages 1-350 (May 2024)
-
Volume 87
Pages 1-338 (April 2024)
-
Volume 86
Pages 1-312 (March 2024)
-
Volume 85
Pages 1-334 (February 2024)
-
Volume 84
Pages 1-308 (January 2024)
-
Volume 95
-
Volumes 72-83 (2023)
-
Volume 83
Pages 1-258 (December 2023)
-
Volume 82
Pages 1-204 (November 2023)
-
Volume 81
Pages 1-188 (October 2023)
-
Volume 80
Pages 1-202 (September 2023)
-
Volume 79
Pages 1-172 (August 2023)
-
Volume 78
Pages 1-146 (July 2023)
-
Volume 77
Pages 1-152 (June 2023)
-
Volume 76
Pages 1-176 (May 2023)
-
Volume 75
Pages 1-228 (April 2023)
-
Volume 74
Pages 1-200 (March 2023)
-
Volume 73
Pages 1-138 (February 2023)
-
Volume 72
Pages 1-144 (January 2023)
-
Volume 83
-
Volumes 60-71 (2022)
-
Volume 71
Pages 1-108 (December 2022)
-
Volume 70
Pages 1-106 (November 2022)
-
Volume 69
Pages 1-122 (October 2022)
-
Volume 68
Pages 1-124 (September 2022)
-
Volume 67
Pages 1-102 (August 2022)
-
Volume 66
Pages 1-112 (July 2022)
-
Volume 65
Pages 1-138 (June 2022)
-
Volume 64
Pages 1-186 (May 2022)
-
Volume 63
Pages 1-124 (April 2022)
-
Volume 62
Pages 1-104 (March 2022)
-
Volume 61
Pages 1-120 (February 2022)
-
Volume 60
Pages 1-124 (January 2022)
-
Volume 71
- Volumes 54-59 (2021)
- Volumes 48-53 (2020)
- Volumes 42-47 (2019)
- Volumes 36-41 (2018)
- Volumes 30-35 (2017)
- Volumes 24-29 (2016)
- Volumes 18-23 (2015)
- Volumes 12-17 (2014)
- Volume 11 (2013)
- Volume 10 (2012)
- Volume 9 (2011)
- Volume 8 (2010)
- Volume 7 (2009)
- Volume 6 (2008)
- Volume 5 (2007)
- Volume 4 (2006)
- Volume 3 (2005)
- Volume 2 (2004)
- Volume 1 (2003)
Volume 113
Uzun, F. (2026). Hybrid surrogate–physics framework for rapid initialisation of granular packings in discrete element simulations. Particuology, 113, 102-112. https://doi.org/10.1016/j.partic.2026.03.020
Hybrid surrogate–physics framework for rapid initialisation of granular packings in discrete element simulations (Open Access)
Fatih Uzun *
Department of Engineering Science, University of Oxford, Oxford, UK
10.1016/j.partic.2026.03.020
Volume 113,
June 2026,
Pages 102-112
Received 8 January 2026, Revised 26 February 2026, Accepted 9 March 2026, Available online 27 March 2026, Version of Record 2 April 2026.
E-mail:
fatihuzun@me.com; fatih.uzun@eng.ox.ac.uk
Highlights
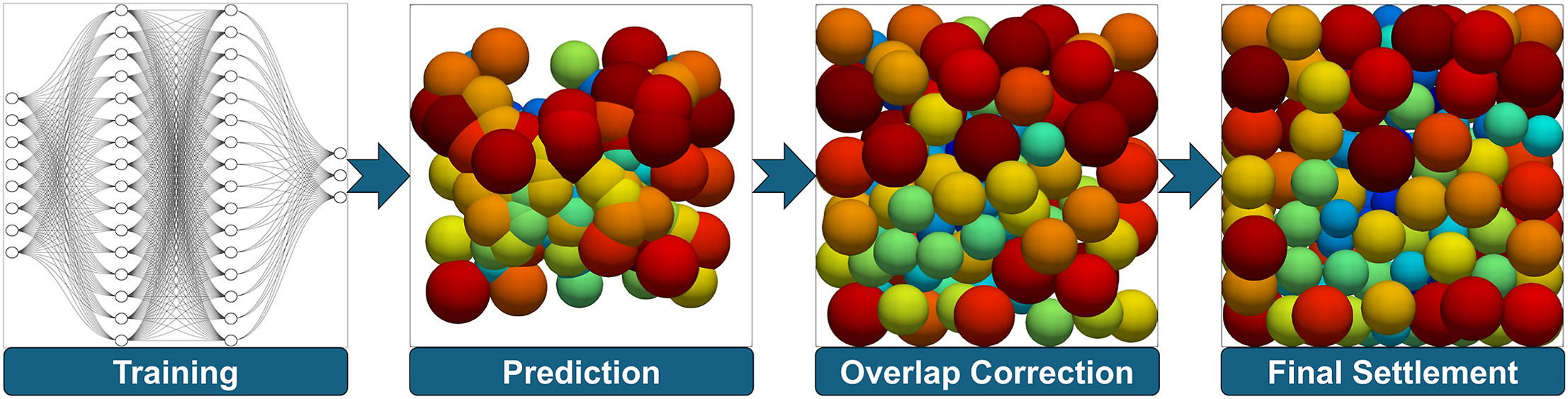
• Hybrid surrogate–physics framework accelerates DEM packing generation.
• Neural network predicts particle equilibrium, bypassing dynamic settling.
• Physics-based overlap correction ensures rigorous mechanical stability.
• The proposed pipeline significantly reduces required computational iterations.
• This hybrid method successfully reproduces coordination number statistics.
Abstract
The initialisation of mechanically stable granular packings is a computationally expensive prerequisite for many discrete element method (DEM) simulations, as conventional dynamic settling requires long transient phases dominated by repeated contact resolution and energy dissipation. This work presents a hybrid surrogate–physics framework for rapidly approximating static equilibrium packings while retaining physical admissibility. A particle-wise neural network surrogate is trained to predict approximate equilibrium particle coordinates directly from initial conditions and material properties, using reference solutions generated by an energy-based DEM formulation. Because particle-wise predictions do not explicitly enforce local contact topology, the surrogate output is post-processed through a mandatory overlap-correction stage followed by a short physics-based relaxation to recover mechanically stable configurations. A physics-aware composite loss function incorporating boundary and overlap penalties improves the geometric plausibility of the surrogate predictions. The framework is evaluated on small-scale representative granular packing scenarios as a methodological proof-of-concept for computationally expensive applications such as die filling. It reproduces physically consistent final states while offering a substantial reduction in the computational effort required to reach equilibrium compared to full dynamic settling. Validation using packing structure and coordination number statistics confirms that the hybrid approach recovers both global and local characteristics of mechanically stable granular assemblies.
Graphical abstract
Keywords
Discrete element method (DEM); Surrogate modelling; Hybrid simulation; Granular packing; Physics-aware machine learning; Multilayer perceptron (MLP)
文章导读